publications by categories in reversed chronological order.
2022
 A Framework for Generating Dangerous Scenes for Testing RobustnessXu, Shengjie, Mi, Lan, and Gilpin, Leilani H.In NeurIPS 2022 Workshop - Progress and Challenges in Building Trustworthy Embodied AI 2022
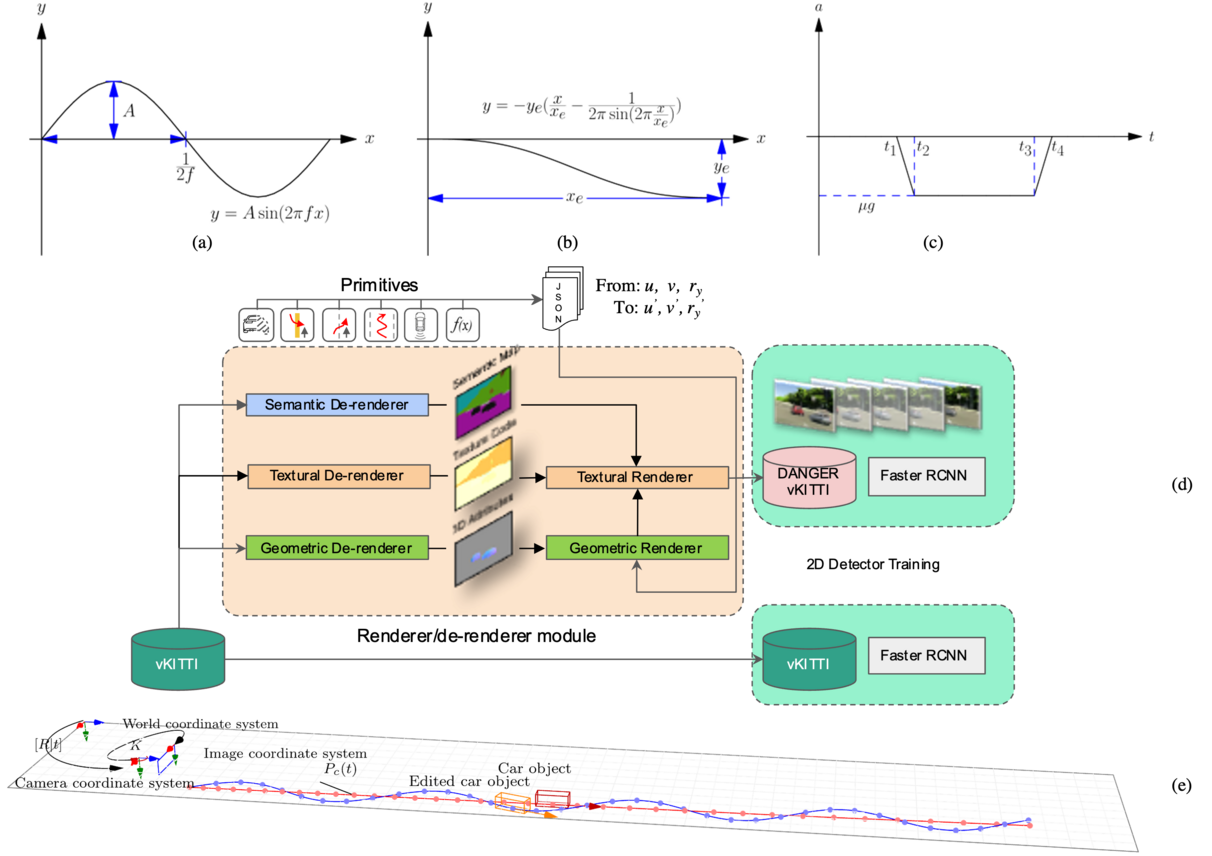
A Framework for Generating Dangerous Scenes for Testing RobustnessXu, Shengjie, Mi, Lan, and Gilpin, Leilani H.In NeurIPS 2022 Workshop - Progress and Challenges in Building Trustworthy Embodied AI 2022Benchmark datasets for autonomous driving, such as KITTI, nuScenes, Argoverse, or Waymo are realistic but designed to be faultless. These datasets do not contain errors, difficult driving maneuvers, or other corner cases. We propose a framework for perturbing autonomous vehicle datasets, the DANGER framework, which generates edge-case images on top of current autonomous driving datasets. The input to DANGER are photorealistic datasets from real driving scenarios. We present the DANGER algorithm for vehicle position manipulation and the interface towards the renderer module, and present five scenario-level dangerous primitives generation applied to the virtual KITTI and virtual KITTI 2 datasets. Our experiments prove that DANGER can be used as a framework for expanding the current datasets to cover generative while realistic and anomalous corner cases.
 DANGER: A Framework of Danger-Aware Novel Dataset Generator Extension for Robustness Test of Machine LearningXu, Shengjie, and Gilpin, Leilani H.In BayLearn - Machine Learning Symposium (Abstract paper, Poster) 2022
DANGER: A Framework of Danger-Aware Novel Dataset Generator Extension for Robustness Test of Machine LearningXu, Shengjie, and Gilpin, Leilani H.In BayLearn - Machine Learning Symposium (Abstract paper, Poster) 2022Abstract: Benchmark datasets for autonomous driving, such as KITTI, Argoverse, or Waymo are realistic, but they are designed to be too idealistic. These datasets do not contain errors, difficult driving maneuvers, or other corner cases. We propose a framework for perturbing autonomous vehicle datasets, the DANGER framework, which generates edge-case images on top of current autonomous driving datasets. The input to DANGER is a photorealistic datasets from real driving scenarios. We present the DANGER algorithm for vehicle position manipulation and the interface towards the renderer module, and present primitive generation cases applied to the virtual KITTI dataset. Our experiments prove that DANGER can be used as a framework for enlarging the current dataset to cover generative corner cases.
 The Study of Complex Human Locomotion Behaviors: From Crawling to WalkingXu, Shengjie, and Mok, KevinIn arXiv 2022
The Study of Complex Human Locomotion Behaviors: From Crawling to WalkingXu, Shengjie, and Mok, KevinIn arXiv 2022
2020
 Integrated Model Predictive Control and Adaptive Unscented Kalman Filter for Semi-Active Suspension System Based on Road ClassificationWang, Zhenfeng, Xu, Shengjie, Li, Fei, Wang, Xinyu, Yang, Jiansen, and Miao, JingIn WCX SAE World Congress Experience 2020
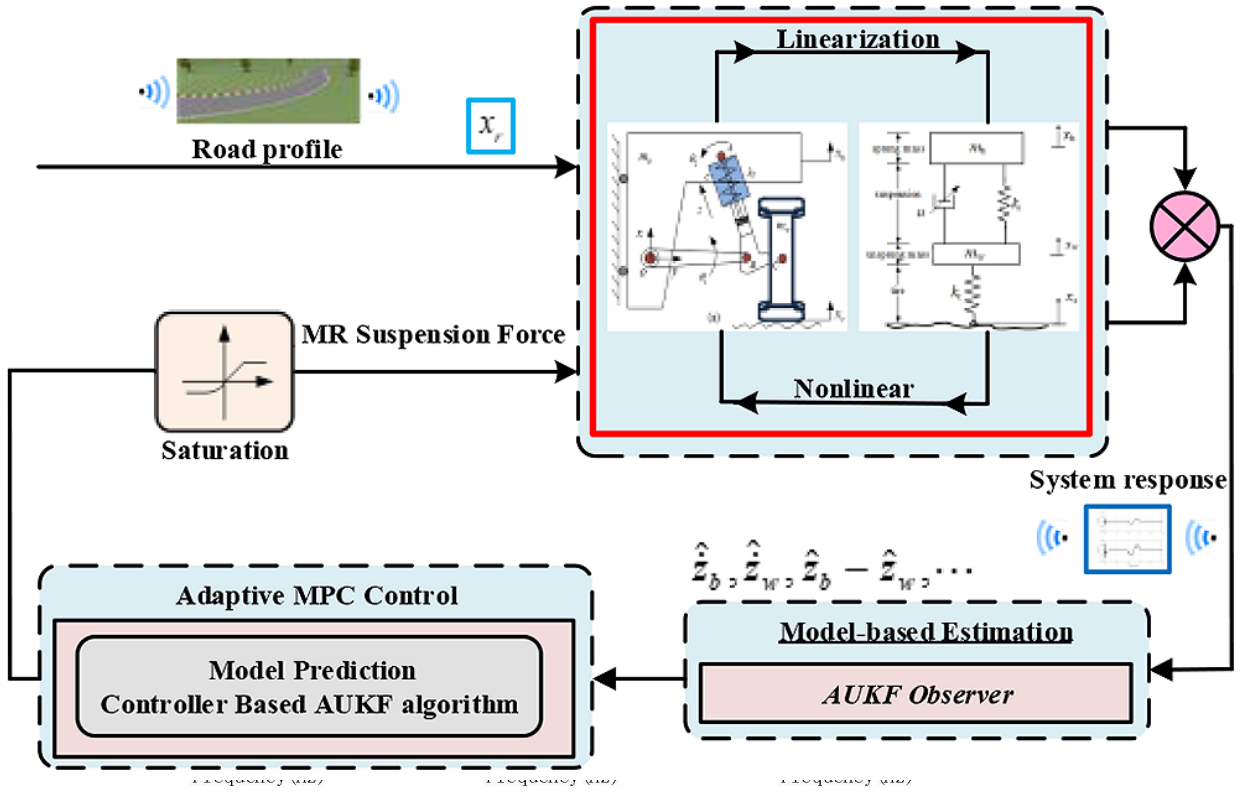
Integrated Model Predictive Control and Adaptive Unscented Kalman Filter for Semi-Active Suspension System Based on Road ClassificationWang, Zhenfeng, Xu, Shengjie, Li, Fei, Wang, Xinyu, Yang, Jiansen, and Miao, JingIn WCX SAE World Congress Experience 2020The accuracy of state estimation and optimal control for controllable suspension system is a challenging task for the vehicle suspension system under various road excitations. How to effectively acquire suspension states and choose the reasonable control algorithm become a hot topic in both academia and industry. Uncertainty is unavoidable for the suspension system, e.g., varying sprung or unsprung mass, suspension damping force or spring stiffness. To tackle the above problems, a novel observer-based control approach, which combines adaptive unscented Kalman filter (AUKF) observer and model predictive control (MPC), is proposed in the paper. A quarter semi-active suspension nonlinear model and road profile model are first established. Secondly, using the road classification identification method based on system response, an AUKF algorithm is employed to estimate accurately the state of suspension system. Due to the nonlinear of semi-active suspension damping force in the movement process, the methods of observer-based and model predictive control are used to design the optimal predictive controller under various road excitations. Finally, compared with passive suspension system, the constrained optimal control (COC) algorithm and the model predictive control (MPC) algorithm, the road handing and ride comfort indexes are analyzed. Simulation results show that the performance of the proposed model predictive control algorithm compared with passive mode for the semi-suspension system improves more than 10% under the same road excitation condition.
2019
 Modified Quasi-Newton Optimization Algorithm-Based Iterative Learning Control for Multi-Axial Road Durability Test RigWang, Xiao, Cong, Dacheng, Yang, Zhidong, Xu, Shengjie, and Han, JunweiIEEE Access 2019
Modified Quasi-Newton Optimization Algorithm-Based Iterative Learning Control for Multi-Axial Road Durability Test RigWang, Xiao, Cong, Dacheng, Yang, Zhidong, Xu, Shengjie, and Han, JunweiIEEE Access 2019The iterative learning control (ILC) based on the linear frequency-domain model has been employed to replicate the road conditions for the vehicle durability testing in the laboratory. Generally, the vehicle and the multi-axial hydraulic test rig behave strong nonlinearities, which requires a large number of iterations to correct the tracking error. Hence, the process of drive file (i.e., the input signals which drive the actuators of the test rig) generation is time-lengthy and tedious. A method that combines the ILC with the Quasi-Newton algorithm over the complex space (QNILC) is developed to speed up the drive file construction for the multi-axial vibration test rig. The impedance matrix can be updated with Broyden’s method to reduce the modeling errors and make the iteration more robust. An auxiliary estimating loop is inserted into the iteration process to attain an optimal learning gain. The convergence of the proposed method has been proven to be monotonic. This approach is validated through simulation, where the target signals are the real-life spindle forces gathered from the wheel force transducer. The simulation results demonstrate that the QNILC can improve the convergence rate and increase the tracking accuracy than the current offline ILC. The QNILC reduces the iteration number from nine down to five to converge to the desirable index compared with the offline ILC using gain 0.5. The new method based on the optimization algorithm can extend to other repetitive tracking processes.
- Iterative Learning Control with Complex Conjugate Gradient Optimization Algorithm for Multiaxial Road Durability Test RigWang, Xiao, Cong, Dacheng, Yang, Zhidong, Xu, Shengjie, and Han, JunweiProceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 2019
Service load replication performed on multiaxial hydraulic test rigs has been widely applied in automotive engineering for durability testing in laboratory. The frequency-domain off-line iterative learning control is used to generate the desired drive file, i.e. the input signals which drive the actuators of the test rig. During the iterations an experimentally identified linear frequency-domain system model is used. As the durability test rig and the specimen under test have a strong nonlinear behavior, a large number of iterations are needed to generate the drive file. This process will cause premature deterioration to the specimen unavoidably. In order to accelerate drive file construction, a method embedding complex conjugate gradient algorithm into the conventional off-line iterative learning control is proposed to reproduce the loading conditions. The basic principle and monotone convergence of the method is presented. The drive signal is updated according to the complex conjugate gradient and the optimal learning gain. An optimal learning gain can be obtained by an estimate loop. Finally, simulations are carried out based on the identified parameter model of a real spindle-coupled multiaxial test rig. With real-life spindle forces from the wheel force transducer in the proving ground test to be replicated, the simulation results indicate that the proposed conventional off-line iterative learning control with complex conjugate gradient algorithm allows generation of drive file more rapidly and precisely compared with the state-of-the-art off-line iterative learning control. Few have been done about the proposed method before. The new method is not limited to the durability testing and can be extended to other systems where repetitive tracking task is required.
2018
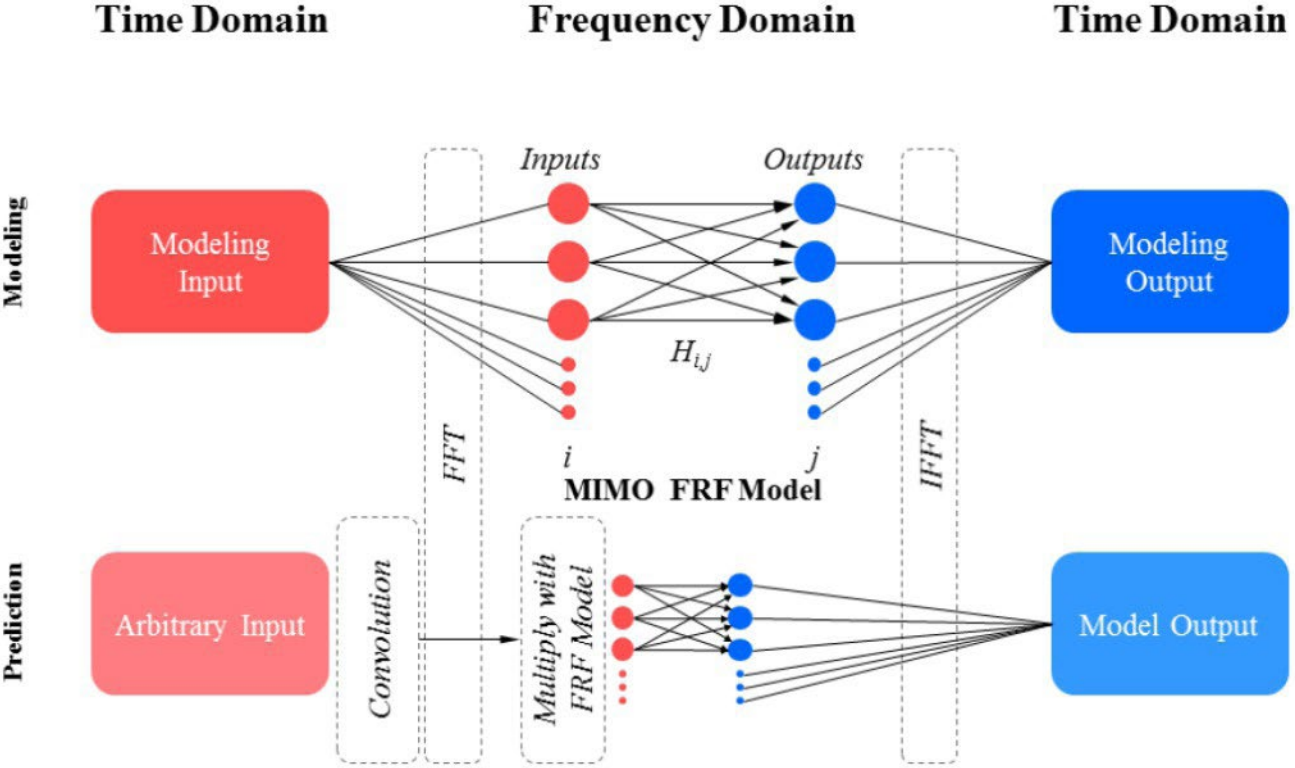 The Synthetic 3DOF Wheel Force for Passenger Vehicle Based on Predicted Frequency Response Function ModelXu, ShengjieIn WCX World Congress Experience 2018
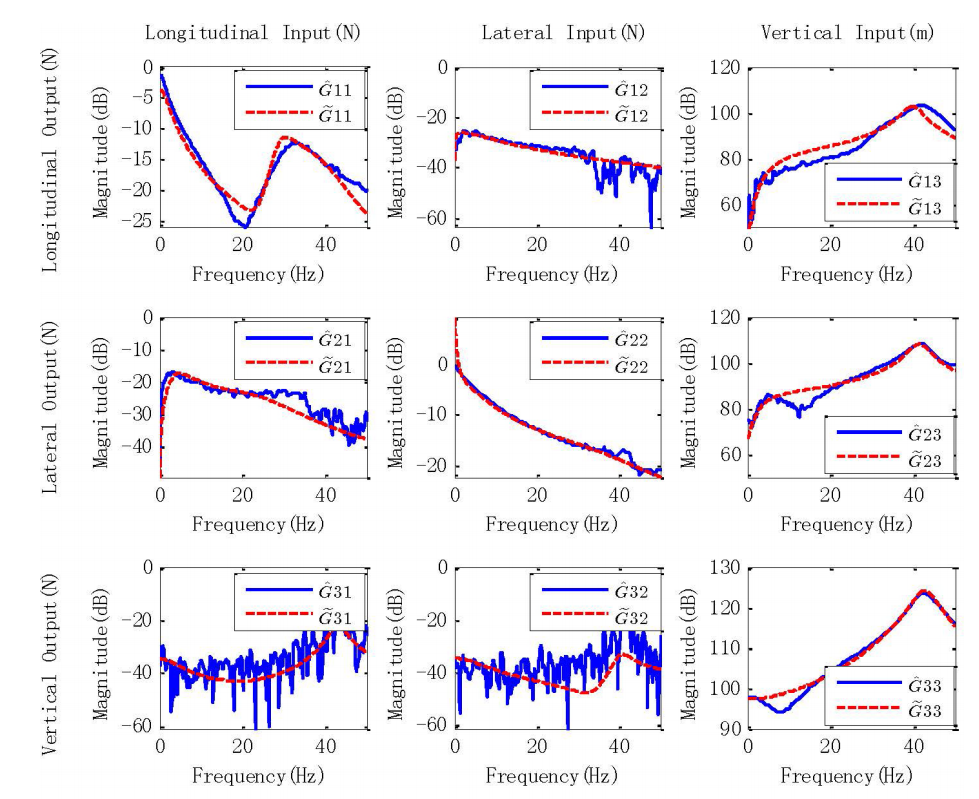
The Synthetic 3DOF Wheel Force for Passenger Vehicle Based on Predicted Frequency Response Function ModelXu, ShengjieIn WCX World Congress Experience 2018To determine the vehicle chassis requirements, wheel force transducer (WFT) have been the best option when it is being used in targeting customer correlation or determining the effective use of the proving ground. However, using wheel force transducer in customer correlation fleet test is often unfeasible due to the huge cost and low practicability. As a result, engineers have to choose other transducer measures. This paper describes an effective approach of wheel force prediction by using the frequency response function (FRF) model of vehicle dynamic system. A vehicle system linear modelling technique is used. For the system identification of FRF, the acceleration and wheel force time history data, as system input and output, are collected from an instrumented passenger car as it traverses in different real-world proving ground surfaces. The obtained FRF represents the complex suspension mechanical model. Once the FRF is calculated, the predicted force signal can be implemented. The quality evaluation of prognostication results is made by comparing the synthetic and real-world wheel force signals in time/frequency domain and frequency-related pseudo damage. The result indicates that the FRF derived from real-world data is an effective modelling tool. Furthermore, it is a promising application in the field of customer usage fleet test and suspension dynamic system modelling or control.